弁護士 石田 優一
目次
第1章 はじめに
第2章 交通事故が起きる原因とは
1 交通事故の発生要因となるプロセス
2 認知ミス
3 判断ミス
4 制御ミス
第3章 自動運転車と歩行者との間で発生した交通事故の法的責任
1 不法行為責任(民法709条)を追及することができるか
2 運行供用者責任(自賠法3条)を追及することができるか
3 製造物責任(PL法3条)を追及することができるか
4 過失相殺の問題
第4章 自動運転車と自動運転車との間で発生した交通事故の法的責任
1 各設例で検討しなければならない問題
2 被害車両のメーカーの過失を理由に過失相殺を主張することができるか
3 加害車両のメーカーと被害車両のメーカーとは共同不法行為責任を負うか
第5章 現行法の問題点
1 物損事故では運行供用者責任を追及することができない問題
2 メーカーが製造物責任の負担を強いられることによる問題
3 求償関係が複雑化する問題
第6章 自賠責保険制度の発展による問題解決の提案
第1章 はじめに
今回のコラムは、完全自動運転仕様の自動車が交通事故を起こしてしまった場合に、だれにどのような責任が課せられるのかがテーマです。
完全自動運転とは、条件の限定なくシステムがすべての運転を担当し、緊急時にもドライバーの支援を必要としない自動運転のことです。完全自動運転では、ドライバーが不要になり、すべてシステム任せで目的地に向かうことができるようになります。
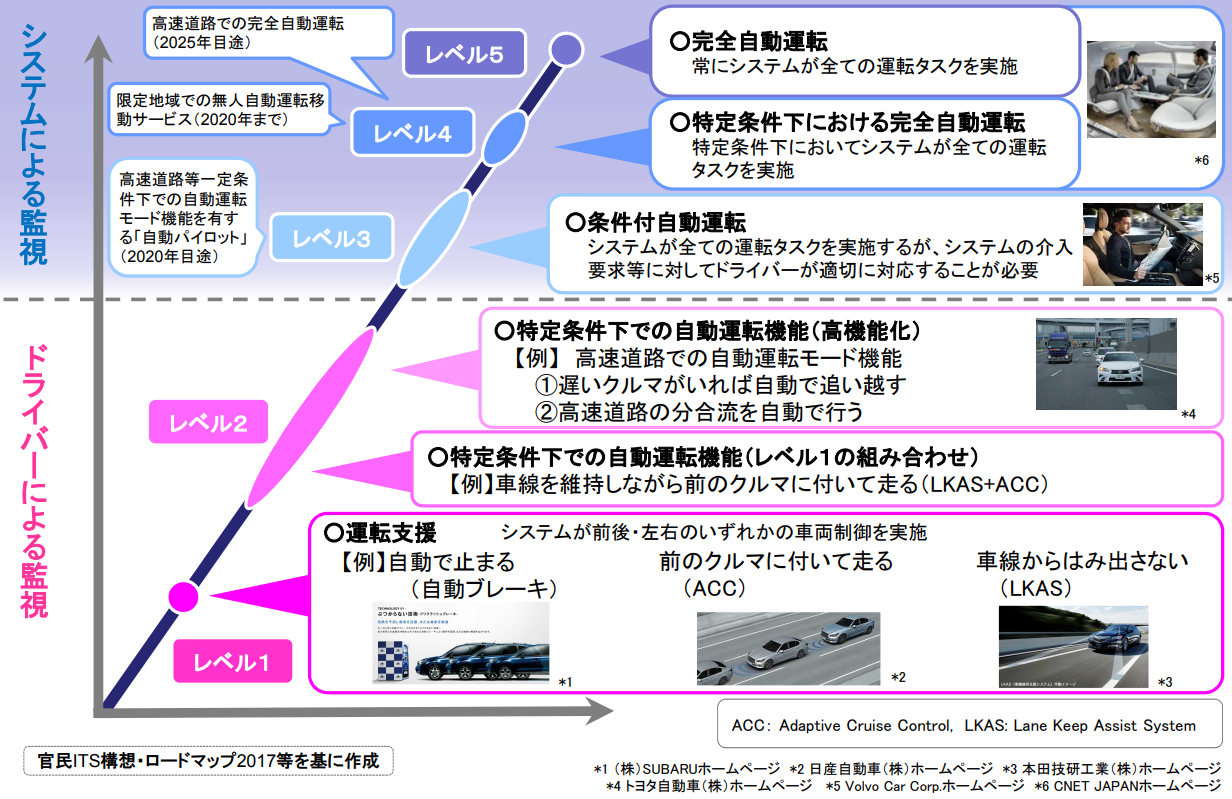
国土交通省「自動運転のレベル分けについて」(https://www.mlit.go.jp/common/001226541.pdf)より
現在、自動運転技術の研究と実験が積極的に行われていて、その技術力は急速に進歩しています。政府は、2025年頃に高速道路での完全自動運転技術を実用化する計画を掲げており、完全自動運転は、もはや夢物語でも、遠い未来の技術でもなくなってきています。
今後、完全自動運転が実用化されるまでに検討しなければならない課題は、完全自動運転仕様の自動車が交通事故を起こしてしまった場合の法的責任です。完全自動運転の場合、ドライバーの過失を問うことが難しいことから、だれにどのような法的責任を問うことができるのかが課題となります。
第2章 交通事故が起きる原因とは
1 交通事故の発生要因となるプロセス
自動車の運転は、「認知→判断→制御」というプロセスを経て行われるもので、その点において自動運転とドライバーによる運転に違いはありません。
交通事故の発生要因としては、(1)認知のプロセスにおいて状況を誤って認識したこと(認知ミス)、(2)認識している状況のもとで交通事故の発生を回避するための適切な判断を行えなかったこと(判断ミス)、(3)判断は適切に行ったにもかかわらずその判断に対応する適切な制御ができなかったこと(制御ミス)が挙げられます。
2 認知ミス
自動車を運転する際には、交通事故を発生させないために様々な周囲の事情を認知しています。
第1に、他の車両や人、障害物との接触を避けるために、それぞれの位置関係や距離を視覚によって認知しています。
第2に、信号や道路標識などの交通規制を示すものや、走行車線、交差点・分合流などの道路状況を認知しています。
第3に、路面の状況(アスファルト、砂利道、積雪など)や天候(大雨・大雪など)を認知しています。これらの事情に対して認知ミスがあると、判断や制御を誤る結果につながり、交通事故の発生要因となります。
3 判断ミス
自動車を運転する際には、認知した様々な外部の事情をもとに、交通事故を回避するために、高度な判断を求められています。
第1に、他の車両や人、障害物との位置関係や距離に基づいて、これらとの接触を回避するために適切な走行速度と進行方向を判断することが求められます。このような判断においては、死角に存在する可能性のある障害物や人の飛び出しの可能性など、認知した事情に基づく危険予測も求められます。
第2に、交通規制や道路状況を踏まえて、他の車両や人と協調的な関係を維持するために適切な走行速度と進行方向を判断することが求められます。このような判断においては、他の車両や人が「次にどのような行動に出るか」(車両であれば右左折・車線変更・停止・発進・加減速など)を予測することが求められます。
第3に、路面の状況や天候に応じて、ハイドロプレーニング現象(タイヤと路面との間に水の膜ができて制御困難になる現象)など制御に影響を及ぼす現象の発生を予測して、減速や進行方向の急な変更の防止など、適切な制御の方法を判断することも求められます。
これらの判断が正確に行われないと、制御を誤る結果につながり、交通事故の発生要因となります。
4 制御ミス
ドライバーが正確な判断を行ったにもかかわらず、制御ミスが発生するケースは、大きく2つあります。
第1に、アクセルとブレーキの踏み間違えや、強弱の誤り、ハンドルの切り方の誤りなど、ドライバーの操作上の誤り(判断ミスという理解もありえます。)によって生じるものです。
第2に、ブレーキ機能の不調やタイヤの異常など、自動車側の問題によって生じるものです。これは、ドライバーの運転中の過失とはいえないものの、自動車の構造上の欠陥又は機能の障害と考えることができるもので、広義の制御ミスの1つと整理することができます。
第3章 自動運転車と歩行者との間で発生した交通事故の法的責任
【設例】
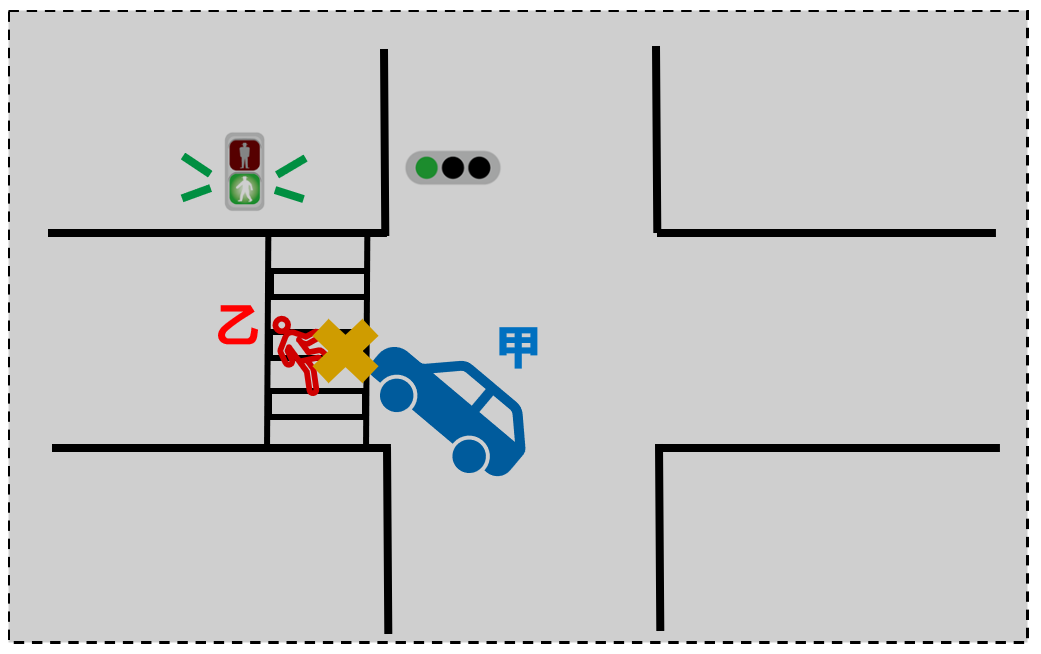
甲さんが乗車していた自動運転車(完全自動運転仕様)が、交差点で左折しようとしたところ、横断歩道を乙さんが横断していました。乙さんの側の信号は青色点滅の状態でした。自動運転車は、乙さんが黒色の服を着ており、夜間であったことから、カメラやセンサーが乙さんの存在を認識することができず、乙さんに衝突してしまいました。自動運転車に整備不良や故障はなく、搭載されているシステムのアップデートを怠ったような事情もありませんでした。乙さんは、骨折により200万円の人身損害を負ったほか、持ち物を破損して30万円の物損を負いました。乙さんは、甲さんや自動運転車のメーカーに損害賠償を請求することができるでしょうか。
1 不法行為責任(民法709条)を追及することができるか
(1) 甲が仮にドライバーであったならば
甲が乗車していたのが自動運転車ではなく、一般的な自動車であり、甲がドライバーであったならば、甲に対して不法行為責任を追及することができます。
不法行為責任は、「故意又は過失によって他人の権利又は法律上保護される利益を侵害した」(民法709条)ことを理由に認められます。甲がドライバーであったならば、甲が乙の存在を見落とした「過失」によって乙の権利を侵害したといえますので、甲に対して不法行為責任が認められることに問題はありません。
(2) 自動運転車の利用者に「過失」はあるか
では、本設例の場合、甲に「過失」があったといえるでしょうか。結論としては、甲に「過失」を認めることは難しいように思われます。
「過失」とは、「結果の発生を予見することができたにもかかわらず、その結果の発生を回避するために必要な行為をしなかったこと」をいいます。そして、予見の対象は、一般に、「いつか事故が起きるかもしれない」という抽象的な結果ではなく、「このまま走行を続ければ前方の歩行者に接触するかもしれない」というような具体的な結果でなければならないと理解されています。
完全自動運転に対応した自動車としての要件を満たすためには、これまでドライバーが行っていた動作のすべてをシステムが代替し、システムの動作に対してドライバーが監視を行う必要がないことが必要です。裏を返せば、完全自動運転に対応した自動車の利用者は、システムが安全な運転を継続することを全面的に信頼していることが通常です。
そうすると、完全自動運転に対応した自動車の利用者は、「このまま走行を続ければ前方の歩行者に接触するかもしれない」というような具体的な結果を予見することが一般に困難であると考えられます。
以上の理由から、本設例においても、甲に「過失」を認めることは難しいものと思われます。
なお、自動運転車に搭載されたシステムのアップデートを怠ったように、自動運転車の管理に問題があった場合には、例外的に「過失」を問題にする余地があります。
(3) まとめ
以上のとおり、完全自動運転の場合、基本的には、通常の交通事故のように不法行為責任を根拠に損害賠償責任を追及することが困難です。そこで、それ以外の根拠で損害賠償責任を追及することができないかを検討する必要があります。
2 運行供用者責任(自賠法3条)を追及することができるか
(1) 運行供用者責任とは
自動車損害賠償保障法(自賠法)第3条では、自動車の人身事故(物損事故は対象外です)について、損害賠償責任の特別なルールを定めています。このルールに基づく責任を、一般に「運行供用者責任」といいます。
運行供用者責任を定めた条文は、次のとおりです。
自賠法第3条
自己のために自動車を運行の用に供する者は、その運行によつて他人の生命又は身体を害したときは、これによつて生じた損害を賠償する責に任ずる。ただし、自己及び運転者が自動車の運行に関し注意を怠らなかつたこと、被害者又は運転者以外の第三者に故意又は過失があつたこと並びに自動車に構造上の欠陥又は機能の障害がなかつたことを証明したときは、この限りでない。
条文によれば、「自己のために自動車を運行の用に供する者」(運行供用者)は、原則として、「他人」の人身損害に対する賠償責任を負います。ただし、次の3つの要件のすべてを証明した場合に限り、その責任を免れることになっています。
(a) 自己及び運転車が自動車の運行に関し注意を怠らなかったこと
(b) 被害者又は運転者以外の第三者に故意又は過失があったこと
(c) 自動車に構造上の欠陥又は機能の障害がなかったこと
それでは、それぞれの要件について、本設例に当てはめて考えていきたいと思います。
(2) 自己のために自動車を運行の用に供する者(運行供用者)
本設例における甲は、「自己のために自動車を運行の用に供する」立場(運行供用者)であったといえるでしょうか。
運行供用者とは、自動車の使用について支配権を有し(運行支配性)、その使用によって利益が自己に帰属する(運行利益性)者のことをいうと一般に考えられています。運行支配を必要とする理由は、リスクを管理する者はそのリスクから生じた損害に対して責任を負うべきという危険責任の発想があると考えられます。また、運行利益を必要とする理由は、事業活動によって利益を得ている者はそこから生じる損害に対して責任を負うべきという報償責任の発想があると考えられます。運行利益性については、運行支配性を認めづらい場合に運行供用者であることを認められるための副次的な要素として考慮する見解が有力です。
まず、運行支配性の観点でいえば、少なくとも自動運転車のオーナーは、その使用について支配権を有する立場にあると考えられます。オーナーは、自動運転車に動作異常がないか、定期的に点検・整備をしているかを管理する立場にあり、自動運転車から生じうるリスクを管理しているといえるからです。
次に、運行利益性については、自動運転車を営業目的で使用している場合は、運行利益性を認めやすい一方、単に自動運転車をプライベートで使用しているオーナーについては、運行利益性の説明をしづらい問題があります。もっとも、運行利益性が副次的な要素にすぎないという見解によれば、自動運転車を営業に使用しているかプライベートで使用しているかによって、結論に大きな差異は生じないものと考えられます。また、運行利益の意味を広くとらえれば、プライベートでも何らかの無形の利益を得ていると説明することができます。
少なくとも、甲が自動運転車のオーナーの立場にあったのであれば、甲が運行供用者であることが認められるように思われます。
(3) 自己及び運転車が自動車の運行に関し注意を怠らなかったこと
「自動車の運行に関し注意を怠らなかった」の意味については、不法行為責任にいう「過失」がなかったことと同じ意味であると理解されます。不法行為責任で検討したとおり、「過失」を問題にすることは難しいものと思われます。なお、自動運転車に搭載されたシステムのアップデートを怠ったように、自動運転車の管理に問題があった場合には、例外的に運行供用者の「過失」を問題にする余地があります。
(4) 被害者又は運転者以外の第三者に故意又は過失があったこと
まず、被害者の過失については、被害者に全面的な過失があった場合に限定され、被害者の過失がその程度に至っていないのであれば、運行供用者責任は認めたうえで、後ほど取り上げる過失相殺を適用すべきであると考えられます。被害者に全面的な過失があった場合とは、例えば、被害者が自動車を運転していた場合に後方から追突してきた事例などが考えられます。
次に、運転者以外の第三者の過失については、自動運転車のメーカーに過失があった点を問題にすることが考えられます。もっとも、メーカーに過失があるならば、「自動車に構造上の欠陥又は機能の障害」があったことも認められるはずですので、メーカーの過失をここで問題にすることに意味はありません。
以上のとおり、「被害者又は運転者以外の第三者に故意又は過失があったこと」の要件が実際に問題になるのは、被害者による追突など、被害者に全面的な過失があった場合に限られるものと考えられます。
(5) 自動車に構造上の欠陥又は機能の障害がなかったこと
「構造上の欠陥」とは、自動車各部の装置、部品の材料、仕組み、製造方法、補修その他に欠陥があることをいいます。また、「機能の障害」とは、各装置が規定どおりに作動しないことをいいます。「構造上の欠陥」や「機能の障害」には、製造時に自動車に「欠陥」があった場合も含むとされています。
本設例においては、「乙が黒色の服を着ており、夜間であったことから、カメラやセンサーが乙さんの存在を認識することができなかった」点が、「構造上の欠陥」や「機能の障害」に該当するかが問題になります。自動運転車に整備不良や故障はなく、搭載されているシステムのアップデートを怠ったような事情もなかったことから、「構造上の欠陥」や「機能の障害」があったかどうかは、製造時に「欠陥」があったかどうかの問題と重なるものと考えられます。「欠陥」が認められるかどうかは、製造物責任の説明において改めて取り上げます。
なお、製造物責任が「欠陥」の立証責任を被害者に課しているのに対して、運行供用者責任においては「構造上の欠陥又は機能の障害がなかったこと」の立証責任を運行供用者に課している点が、製造物責任とは異なっています。
(6) まとめ
自動運転車のオーナーの立場で運行供用者責任を問われた場合、自動運転車に「構造上の欠陥又は機能の障害がなかったこと」を立証することができない限り、その責任を免れることはできません。その立証はかなりハードルが高いものと考えられますので、自動運転車との間での交通事故においても、運行供用者責任によって多くのケースで被害者救済が実現されるものと思われます。
ただし、運行供用者責任が認められるのは、人身損害に限られ、物損については対象外です。物損の場合は、次に取り上げる製造物責任によって、メーカーに損害賠償を求めることになります。
3 製造物責任(PL法3条)を追及することができるか
(1) 製造物責任とは
製造物責任法(PL法)第3条では、製品の「欠陥」によって他人の生命・身体・財産を侵害したことについて、メーカーに対して特別な損害賠償責任のルールを定めています。このルールに基づく責任を、一般に「製造物責任」といいます。
(2) 製造物責任を追及されるパターン
一般に、自動運転車のメーカーが製造物責任を追及されうるパターンは、大きく3つあります。
第1に、被害者から追及されるパターンです。もっとも、人身事故については、運行供用者責任の主張が可能であることから、被害者が製造物責任を追及することは限られるものと思われます。一方で、運行供用者責任が認められない物損事故においては、製造物責任が問題になりやすいものと思われます。
第2に、運行供用者責任を問われた運行供用者又はその加入保険会社から追及されるパターンです。運行供用者責任に基づいて被害者に損害を賠償した運行供用者又はその加入保険会社は、被害者がメーカーに対して有していた製造物責任に基づく損害賠償請求権を取得することができ(これを「代位」といいます。)、メーカーに対して製造物責任を追及することができます。
第3に、自動運転車同士での衝突事故などで、一方の自動車のメーカーが被害者に製造物責任に基づいて損害を賠償した後で、他方の自動車のメーカーに対して求償するパターンです。これについては、次章で改めて取り上げます。
(3) 製造物責任が認められるための要件
製造物責任第3条
製造業者等は、その製造、加工、輸入又は前条第三項第二号若しくは第三号の氏名等の表示をした製造物であって、その引き渡したものの欠陥により他人の生命、身体又は財産を侵害したときは、これによって生じた損害を賠償する責めに任ずる。ただし、その損害が当該製造物についてのみ生じたときは、この限りでない。
製造物責任が認められるためには、(1)責任の主体が「製造業者等」であること、(2)製造業者等が製造等をした「製造物」であること、(3)その製造物を「引き渡した」こと、(4)引渡しの時点で製造物に「欠陥」があったことが必要です。自動運転車のメーカーは「製造業者等」、自動運転車は「製造物」に該当しますので、自動運転車に「欠陥」があれば、メーカーに対する製造物責任が認められます。
そこで、自動運転車の「欠陥」の意味について、検討したいと思います。
(4) 自動運転車の「欠陥」の判断基準
「欠陥」とは、「当該製造物の特性、その通常予見される使用形態、その製造業者等が当該製造物を引き渡した時期その他の当該製造物に係る事情を考慮して、当該製造物が通常有すべき安全性を欠いていることをいう」と定められています(PL法2条2項)。
第1に、「製造物の特性」という観点では、自動車が交通事故によって人の生命・身体に甚大な被害を及ぼす危険がある点や、長期間使用されることが一般的である点などに鑑みて、交通事故の発生を防ぐために高度な対策が講じられていなければならないといえます。
第2に、「通常予見される使用形態」という観点では、完全自動運転車は条件の制約なくどこでも走行することができる水準が想定されていることから、交通事故の発生リスクが高い条件であったとしても安全性を確保しうるように高度な対策が講じられていなければならないといえます。
第3に、「製造物を引き渡した時期」という観点では、販売時期における技術水準が「通常有すべき安全性」の判断の基準となります。もっとも、自動運転車に搭載されたシステムについては、自動運転業界の技術水準の向上に伴ってアップデートされる仕組みが導入されている必要があり、このようなアップデートの仕組みが導入されていない場合は、「通常有すべき安全性」を欠いていると判断されうるように思われます。
以上の観点から、完全自動運転車の場合、交通事故の発生リスクが高い条件下でも安全な走行を可能にする高度な対策が講じられ、自動運転業界の技術水準の向上に伴ってシステムがアップデートされる仕組みが導入されていなければ、「通常有すべき安全性を欠いている」ものとして「欠陥」が認められるものと考えられます。
(5) 本設例における「欠陥」の検討
交通事故は、(1)認知のプロセスにおいて状況を誤って認識したこと(認知ミス)、(2)認識している状況のもとで交通事故の発生を回避するための適切な判断を行えなかったこと(判断ミス)、(3)判断は適切に行ったにもかかわらずその判断に対応する適切な制御ができなかったこと(制御ミス)、いずれかの要因によって発生します。これらの要因の発生を防ぐための高度な対策が講じられていなければ、「欠陥」が認められるものと考えられます。
本設例では、夜間で歩行者の存在を認知しにくい状況にはありましたが、自動運転車の場合、LiDARやミリ波レーダのような暗闇でも周囲の物や距離を認知することのできるセンターを搭載することで、夜間でも高確率で歩行者を発見することが可能です。
また、一般に横断歩道においては歩行者が横断する可能性を予測しながら通行する必要があり、自動運転車においても、このような危険予測的判断の可能な仕様が導入されていることが求められます。危険予測的判断が可能な仕様は、過去のデータをもとに条件に応じた事故発生リスクを評価するAIや、シミュレーションによって様々な条件に対応した強化学習を施されたAIの導入によって実現しえます。
本設例における甲車は、このような仕様が適切に導入されていなかったか、あるいは、正確に動作しなかったものと考えられるため、「欠陥」があったものと評価しえます。
(6) まとめ
本設例においては、メーカーの製造物責任が認められるように思われますが、実際の交通事故では、自動運転車の「欠陥」によって発生した事故であるかが不明瞭なケースが多々想定されます。このようなケースにおいては、(特に物損事故において)被害者にとっては救済を受けられないリスクがあり、一方で、メーカーにとっても、「欠陥」がないことを主張するために技術情報の開示や説明の負担を強いられることになります。
このような問題を解消するためには、自動運転の交通事故の特性を踏まえた立法的な解決が求められるように思われます。詳しくは、後ほど取り上げたいと思います。
4 過失相殺の問題
(1) 問題点
本設例においては、青信号が点滅しているにもかかわらず乙が横断歩道を渡ろうとした点について、過失相殺が問題になります。
過失相殺の条文上の根拠は、民法722条2項に「被害者に過失があったときは、裁判所は、これを考慮して、損害賠償の額を定めることができる」と規定されていることにあります。運行供用者責任や製造物責任についても、民法の規定を適用する旨の規定(自賠法4条、PL法6条)があることから、過失相殺を適用することができます。
本設例を交通事故実務で一般に使われる認定基準(別冊判例タイムズ38号(民事交通訴訟における過失相殺率の認定基準全訂5版))にそのまま当てはめると、35%の過失相殺が認められます。その理由として、(1)設例と同様の事故態様で歩行者側が青色点滅信号であれば30%の基本的な過失相殺を認める基準と、(2)事故の発生時間帯が夜間であればそこから5%の加算修正を行う基準があるためです。もっとも、これはあくまでも、自動運転を想定していない基準です。
では、このような認定基準は、完全自動運転に対応した自動車が交通事故を発生させた本設例においても、そのまま適用しうるでしょうか。過失相殺が認められる法的根拠と、完全自動運転のシステムとドライバーの認知・判断・制御の違いに着目しながら、その答えを考えていきたいと思います。
(2) 過失相殺が認められる法的根拠
過失相殺が認められる法的根拠は、損害の発生や拡大について被害者が自らリスクを回避すべきであったにもかかわらず、回避のための行為をしなかった場合に、公平の観点から損害賠償の額を調整することにあると考えられます。このような法的根拠に照らせば、過失相殺によって減額される割合(過失相殺率)を判断する際には、被害者が自ら回避すべきリスクを回避しなかったことが損害の発生や拡大にどの程度の影響を及ぼしているかを検討すべきです。
被害者が自らリスクを回避するためにどこまで積極的な行動をとるべきであったかは、加害者側に求められる結果回避行為によってそのリスクの顕在化をどこまで防ぐことができたかとの相関関係によって決まります。加害者においてリスクの顕在化を回避すべき必要性が高かったのであれば、被害者が自らそのリスクを回避すべき行動をとらなければならない必要性はその分減少するからです。
(3) 本設例における過失相殺の検討
ア 青信号が点滅しているにもかかわらず甲が横断歩道を横断した点
前述のとおり、本設例を交通事故実務で一般に使われる認定基準に当てはめると、青信号が点滅しているにもかかわらず甲が横断歩道を横断した点をとらえて、30%の基本的な過失相殺が認められます。
道路交通の場においては、お互いに他人が交通法規を遵守することを信頼して行動しています。道路交通法施行令第2条によれば、歩行者用信号の青色点滅は、「歩行者は、道路の横断を始めてはならず、また、道路を横断している歩行者は、速やかに、その横断を終わるか、又は横断をやめて引き返さなければならない」意味であることが示されています。また、道路交通法34条1項によれば、車両が左折する際には徐行(直ちに停止することができるような速度で進行すること)しなければならないことが定められています。
甲側(自動車側)からすれば、歩行者用信号の青色点滅を見て「横断歩道に歩行者はいない」と判断した点も多少やむをえないところがあり、そのような誤った判断につながった要因の一端は、交通法規を遵守して横断歩道の横断をしない回避行動をとらなかった乙側(歩行者側)にあるといえます。ただ、甲側(自動車側)には徐行義務が課せられて、左折の際に交通事故の発生を積極的に回避すべきことが求められていたわけですから、横断歩道の横断をしない回避行動をとらなかった乙側(歩行者側)の事情を過失相殺の判断で重くとらえすぎることは相当ではありません。これらの趣旨から、30%の基本的な過失相殺を認めることにしたと理解されます。
では、このような認定基準の趣旨に照らして、本設例においても30%の基本的な過失相殺を認めることが妥当といえるでしょうか。
自動運転車も、一般車や歩行者と同じように道路交通の場において行動する立場にある以上、お互いが交通法規を遵守することの信頼のもとに判断を行うように設計されるべきです。自動運転車か一般車かで、リスクの顕在化を回避すべき必要性について要求される水準の差はないものといえます。よって、青信号が点滅しているにもかかわらず甲が横断歩道を横断した点をとらえて一定の過失相殺を認めること自体は、本設例においても妥当であるといえます。
ただし、基本的な過失相殺を30%と考えることの妥当性は、別途検討が必要です。なぜなら、完全自動運転のシステムは、人間であるドライバーよりも早くブレーキをかけることができるからです。人間の場合、歩行者の存在に気づいてからブレーキペダルを踏むまでに平均して0.75秒程度かかるとされています。時速10キロで走行していれば、0.75秒の間に約2メートル移動する計算になります。完全自動運転のシステムであれば、歩行者の存在に気づいてからブレーキをかける制御をするまでの時間はほぼ0秒であると考えられます。そのことから、完全自動運転のシステムのほうが、人間であるドライバーよりも、歩行者の存在を認知した後に交通事故の発生を防ぐことができる可能性が高い(裏を返せば、歩行者側が交通事故の発生を回避するための行動をとるべき必要性がその分減少する)といえます。以上の理由から、本設例においては、基本的な過失相殺を30%よりも小さく設定すべきではないかという考え方がありえます。
イ 事故の発生時間帯が夜間である点
前述のとおり、本設例を交通事故実務で一般に使われる認定基準に当てはめると、事故の発生時間帯が夜間である点をとらえて、過失相殺の割合を5%加算修正することが認められます。このような基準は、完全自動運転においてもそのまま適用しうるのでしょうか。
このような加算修正を認める根拠は、夜間においては、歩行者側からは自動車の存在をライトによって容易に認識しうる一方で、自動車側からは歩行者を認識しづらくなることにあります。
夜間における歩行者の認知能力は、一般車か自動運転車かによって大きな違いがあります。自動運転車の場合、LiDARやミリ波レーダのような暗闇でも周囲の物や距離を認知することのできるセンターを搭載することで、人間であるドライバーよりも明らかに高い確率で夜間に歩行者を認知することができます。そのため、自動車側からは歩行者を認識しづらいことを根拠の1つとした加算修正を適用することが妥当かどうかという問題があります。
(4) まとめ
以上のとおり、完全自動運転が絡む交通事故においては、これまでの過失相殺の認定基準をそのまま当てはめることの妥当性も検討しなければなりません。今後は、自動運転車と一般車とで異なる過失相殺の認定基準を設けるべきかについても、議論を深めていく必要があります。

第4章 自動運転車と自動運転車との間で発生した交通事故の法的責任
【設例】
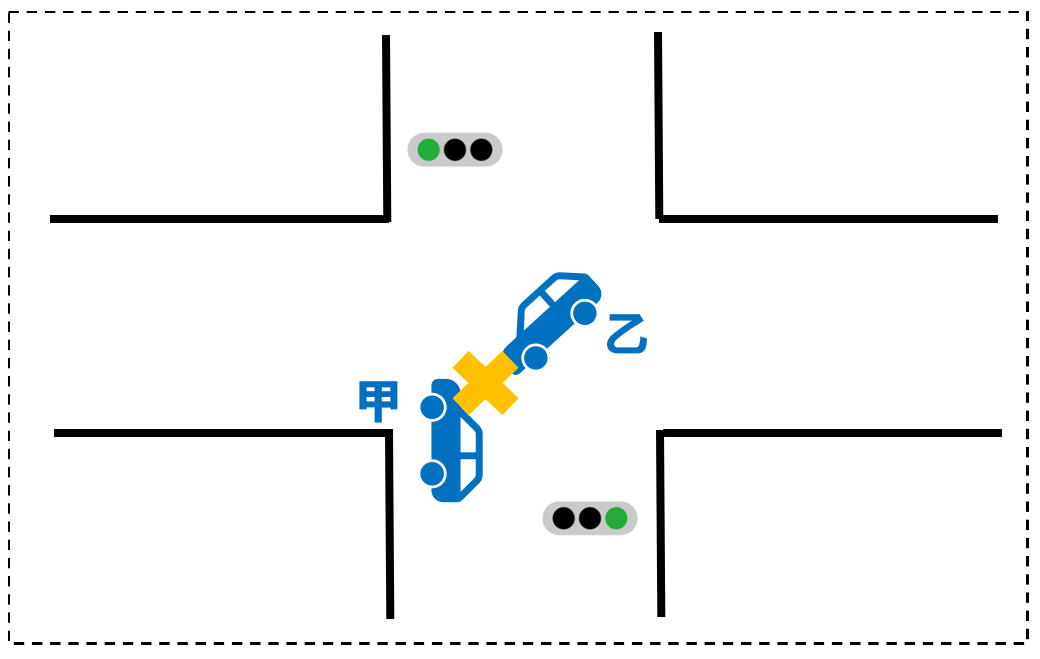
甲・乙いずれも、自動運転車(完全自動運転仕様)に乗車していました。甲車は、交差点を直進していたところ、対向車線を走行していた乙車が右折を開始し、衝突する事故が起きました。事故の理由は、甲車の走行速度について乙車が本来よりも低速度であると誤認識をしたことにありました。乙車メーカーが自動運転車に搭載したシステムの不良が原因であり、全国で同様の事故が多発していました。この事故で、甲も乙も負傷し、それぞれ1000万円の人身損害を負いました。なお、甲車メーカーと乙車メーカーの過失割合は20対80で、甲・乙自身に過失はなかったものとします。
(1) 甲は、乙に対して、運行供用者責任に基づいて1000万円の損害賠償を請求しました。それに対して、乙からは、過失相殺を主張することができるでしょうか。
(2) 乙は、過失相殺の主張が一部認められて、甲に対して800万円を支払ったとします。乙車メーカーは、今回問題になったシステム不良によって信頼を失い、倒産の危機に瀕していました。そこで、乙は、甲車メーカーに対して製造物責任に基づく求償を請求しました。また、甲も、甲車メーカーに対して、製造物責任に基づいて残損害である200万円を請求しました。この場合、甲車メーカーは、計1000万円の支払に応じなければならないのでしょうか。また、支払に応じなければならないとして、乙車メーカーに対してその一部を負担するように求めることはできるでしょうか。
1 各設例で検討しなければならない問題
(1) 設例(1)
本設例において、甲車側が事故の発生を回避することができなかった要因は、甲自身ではなく、もっぱら甲車メーカーにあります。乙は、甲車メーカーの過失を理由として、過失相殺を主張することができるのでしょうか。
(2) 設例(2)
本設例において事故が発生した主な要因は、乙車のシステム不良にあります。それにもかかわらず、甲車メーカーは、1000万円すべての賠償責任を負わなければならないのでしょうか。また、その場合、甲車メーカーから乙車メーカーに対する求償は認められるのでしょうか。
2 被害車両のメーカーの過失を理由に過失相殺を主張することができるか(設例(1))
完全自動運転仕様の自動運転車同士の事故においては、基本的に被害者本人の過失を考えることは難しく、過失相殺を主張するとすれば、被害車両のメーカーの過失を問題することになります。ただ、被害者本人ではない第三者の過失を根拠とすることが認められるのかどうかが問題になります。
この問題を考えるうえで、参考になるのが、「被害者側の過失」という考え方です。判例は、被害者本人の過失ではなくても、「被害者本人と身分上、生活関係上、一体をなすとみられる関係にある者」の過失であれば、過失相殺の理由として主張することができるという考え方を採用しています。このような考え方の背景には、被害者は、加害者から賠償を受けられなかった部分の損害について、「被害者本人と身分上、生活関係上、一体をなすとみられる関係にある者」に対して直接請求することが公平にかなうという発想があると考えられます。
被害車両のメーカーの過失についても同様に過失相殺を認めたうえで、その結果賠償を受けられなかった部分の損害については、被害車両のメーカーに直接請求させることが公平にかなうという発想が同様に認められるのであれば、被害車両のメーカーの過失を理由に過失相殺を主張することができるものと考えられます。
ただ、このような考え方が妥当といえるかどうかは、難しい問題です。従来の判例の枠組みを超えていることから過失相殺を認めるべきではないという見解もありえるところです。
3 加害車両のメーカーと被害車両のメーカーとは共同不法行為責任を負うか(設例(2))
(1) 各メーカーについて単独の製造物責任を問題にした場合
完全自動運転仕様の自動運転車同士が衝突して発生した交通事故においては、各メーカーの製造物責任を問題にすることができます。たとえば、本設例であれば、甲車と乙車との衝突によって発生した事故による損害について、甲車メーカーと乙車メーカーとがいずれも製造物責任を負うことになります。
製造物責任においてメーカーが賠償責任を負う損害とは、「欠陥」と相当因果関係が認められる範囲の損害です。各メーカーの製造物責任を単独でとらえた場合、それぞれの製造した自動運転車の「欠陥」と相当因果関係が認められる範囲の損害とはどこまでかが問題になります。相当因果関係が認められるためには、単に因果関係があるだけではなく、その損害が「欠陥」から生じたということが社会通念上相当といえなければなりません。
本設例において交通事故が発生した理由は、(1)乙車が甲車の進行速度を正確に把握することができなかった問題と、(2)甲車が乙車の右折の開始を認知してすぐに停止しなかった問題にあります。甲車の「欠陥」と交通事故によって発生した損害との間にも、因果関係があることは認められます。もっとも、本設例において甲・乙が負った損害のすべてに対して、甲車の「欠陥」との間での相当因果関係を認めることができるかは、難しい問題です。なぜなら、乙車にシステム不良がなければ本設例において生じたような大きな事故には至らなかったように考えられ、今回の交通事故によって発生した損害のすべてが甲車の「欠陥」と相当因果関係があるものと認められない可能性があるからです。
完全自動運転仕様の自動運転車同士が衝突して発生した交通事故において各メーカーについて単独の製造物責任を問題にした場合、被害者は、賠償を請求する損害の全てが「欠陥」と相当因果関係のある範囲にあることを主張立証する負担を強いられることになります。
(2) 甲車メーカーと乙車メーカーとに共同不法行為責任があると考えられないか
民法第719条
数人が共同の不法行為によって他人に損害を加えたときは、各自が連帯してその損害を賠償する責任を負う。・・・
2 ・・・(省略)・・・
(1)で説明した問題を克服するために、民法719条第1項前段の共同不法行為責任を適用することが考えられます。この規定は、製造物責任にも適用することができます(PL法6条)。
甲車メーカーの製造物責任と乙車メーカーの製造物責任との間で共同不法行為責任を認めることができれば、「連帯してその損害を賠償する責任を負う」という規定から、各メーカーに対して全額の損害賠償を請求することができます。
ここで、甲車メーカーが甲車に「欠陥」を生じさせたことと、乙車メーカーが乙車に「欠陥」を生じさせたことが、「共同の不法行為」に該当するかが問題になります。
判例の立場では、複数の人のそれぞれの行為が客観的に関連しているといえる場合に、それぞれの行為が「共同の不法行為」に該当することを認めています。
甲車メーカーが甲車に「欠陥」を生じさせたことと、乙車メーカーが乙車に「欠陥」を生じさせたことが、客観的に関連していると評価しうるかどうかは、難しい問題です。
同一の被害者に対して同一の時間・場所で同一の被害が発生している点を重視すれば、客観的に関連しているという見方ができます。
ただ、「欠陥」が発生したのはあくまでも製造時であり、各自動運転車は製造場所も製造時間も異なるのであるから、客観的に関連しているとはいえないという見方もありえます。これに対しては、「欠陥」の持つリスクが顕在化したのは事故発生時であり、リスクの顕在化した時点が同一の時間・場所であることをとらえて、客観的に関連していると評価する見方がありえます。
このように、甲車メーカーと乙車メーカーとに共同不法行為責任が認められるのかどうか、また、その責任を認めるとしても理論的にどのように説明するのかについては、難しい問題です。
(3) 甲車メーカーから乙車メーカーに対する求償の請求はできるか
ここからは、甲車メーカーと乙車メーカーとの間に共同不法行為の関係が認められるとして、甲車メーカーから乙車メーカーに対する求償の請求が認められるかどうかを検討します。
「共同の不法行為」をした人(共同不法行為者)は、「共同の不法行為」によって発生したすべての損害を賠償する責任を負いますが、その責任に基づいて1人が全額の賠償をした際は、他の共同不法行為者に一部の負担を求めるために求償の請求をすることができます。求償の請求をすることができる金額は、共同不法行為者それぞれの過失割合によって決まるとされています。
本設例であれば、甲車メーカーと乙車メーカーの過失割合が20対80であることから、甲車メーカーは、乙車メーカーに対して、800万円の求償を請求することができます。
第5章 現行法の問題点
ここまでの検討を整理すると、完全自動運転仕様の自動車が普及した場合、現行法や交通事故の損害賠償実務に、次のような問題が生じることが予想されます。
1 物損事故では運行供用者責任を追及することができない問題
前述したように、人身事故においては、完全自動運転仕様の自動車が相手方であったとしても運行供用者責任を追及することができるケースが多く、被害者救済の観点から現行法でもそこまで問題はありません。
しかし、物損事故においては、運行供用者責任が現行法では認められておらず、被害者は、不法行為責任や製造物責任を根拠に被害者救済を求めなければなりません。ただ、不法行為責任を完全自動運転仕様の自動車のオーナーなどに追及することは基本的に難しく、製造物責任についても自動車の「欠陥」の立証を被害者に課することの問題があります。
完全自動運転仕様の自動車が社会に受け入れられるためには、物損事故についても十分な被害者救済が確保されるような制度が必要です。
2 メーカーが製造物責任の負担を強いられることによる問題
人身事故・物損事故のいずれにおいても、メーカーは、交通事故が発生するたびに、製造物責任を問われるリスクを強いられます。たとえ、製造物責任が最終的に認められないケースであったとしても、メーカーは、自動車に「欠陥」がなかったことを主張するために技術情報の開示や説明の負担を強いられたり、訴訟に発展した場合に多大な労力や時間の負担を強いられたりすることになります。
また、前述したように、完全自動運転が絡む交通事故においては、これまでの認定基準がそもそも妥当するのかという問題があり、新たな認定基準が確立されるまでは、過失割合をめぐってメーカー間の主張が複雑化することが予想されます。
メーカーがこのような多大な紛争リスクを負担しなければならない制度のもとでは、メーカーが自動運転車の開発を躊躇する原因になりかねません。
3 求償関係が複雑化する問題
完全自動運転が絡む交通事故においては、被害車両のオーナーやメーカー、加害車両のオーナーやメーカーのように関係者が複雑にかかわるため、損害賠償の支払をした関係者の1人が他の関係者に対して損害の一部の負担を求める求償の関係性が複雑になります。これによって、紛争リスクが複雑で多面的なものになり、社会経済上の不利益につながる懸念があります。
第6章 自賠責保険制度の発展による問題解決の提案
現在も、交通事故の被害者を救済する制度として、自賠責保険制度が存在します。しかし、現在の自賠責保険制度は、物損事故が適用対象外であることや、人身事故においても運行供用者責任の一部しかてん補されない仕組みであること、自賠責保険会社からメーカーへの求償が想定されることから、前章で取り上げた様々な問題点を解消することができません。
そこで、現在の自賠責保険制度を発展させて、新たな保険制度(仮に「新自賠責保険制度」といいます。)を創設することを提案します。
第1に、運行供用者責任を人身事故・物損事故のいずれでも適用される制度に改めたうえで、新自賠責保険制度では運行供用者責任の全額がてん補される仕組みにすることを提案します。これによって、被害者救済を十分に受けられない問題を解消することができます。
第2に、新自賠責保険制度の保険料はメーカーが負担することとしたうえで、その代わりにメーカーの製造物責任を原則として追及しない(新自賠責保険制度からメーカーに対して求償はしない)制度にすることを提案します。これによって、メーカーが製造物責任の負担を強いられることによる問題や、求償関係が複雑化することによる問題を解消することができます。
第3に、新自賠責保険制度におけるメーカーごとの保険料は、各メーカーの事故発生率に応じて増減する仕組みにして、各メーカーに対して事故発生数を減少させることを促す仕組みにすることを提案します。これによって、各メーカーが率先して事故発生数を減少させるための研究に心血を注ぐようになり、社会全体の事故発生数を減少させることにつながります。
今後、自動運転業界を発展させていくためには、新自賠責保険制度のような抜本的な仕組みを検討していく必要があるように思います。